





Technical Analysis: Recognition Capability of Anti-Drone Radar Technology - Chapter Four (Final Version)
Release time:
2024-12-05
4.2 Recognition Capability
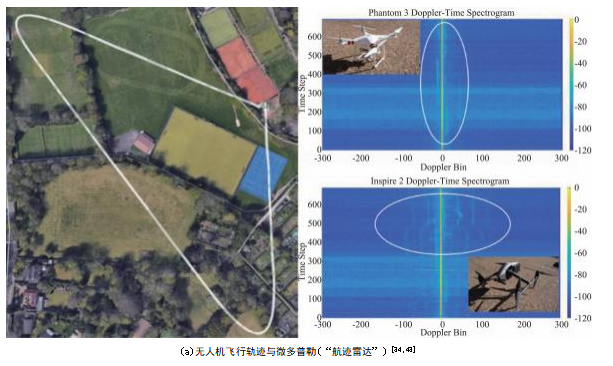
Regarding the limitations of track discrimination capability, theoretically, it can distinguish target types, but in practical applications, its recognition performance level is limited, possibly only to those targets that can be stably tracked, such as birds and drones, achieving a 'Tier-2 Classification' capability. To enhance target recognition performance, in the field of anti-drone radar, 'micro-Doppler radar' (as shown in Figure 7(b)) is the main research direction compared to track discrimination.Although micro-Doppler features are traditionally viewed as kinematic characteristics, they actually capture specific structural features of the target. Considering structural features, the optical band radar waves are more advantageous than the resonant band. Microstructures are small structures attached to the main body of the target, smaller than the main body itself. Therefore, the resonant effects within the resonant band may amplify the scattering capability of the main body but suppress the scattering signals of the micro-Doppler. Additionally, shorter wavelengths will produce better Doppler shifts, and higher Doppler resolution will enhance micro-Doppler features, increasing the difference between the main body Doppler shift and the micro-Doppler shift. Thus, shorter bands, longer radar dwell times, and higher frequency resolutions help achieve better Doppler resolution or yield better micro-Doppler signals.
From the perspective of recognition, 'micro-Doppler radar' (as shown in Figure 7(b)) uses the X-band to detect drone targets, employing Frequency Continuous Wave Modulation (FCWM) with a peak power as low as 1 W, which is cost-effective but can achieve high frequency resolution. By applying deep learning classifiers (such as Convolutional Neural Networks (CNN), Long Short-Term Memory Recurrent Neural Networks (LSTM-RNN), etc.) to micro-Doppler images (time-frequency maps, cepstrum, etc. obtained based on the STFT algorithm or other algorithms), it can not only distinguish between birds and drones but also differentiate types of drones, such as helicopter drones, fixed-wing drones, and multi-rotor drones [41-42] (as shown in Figure 9(b)). Furthermore, it possesses certain system recognition performance adaptability and upgrade capabilities. However, the micro-Doppler scheme also has some issues. First, to obtain good quality micro-Doppler imaging, a shorter detection distance (within a few kilometers) is required, along with a high echo SNR. This means that in practical radar system arrangements, the radar must maintain a tracking gaze state, with a sufficiently long dwell time, and conduct enough tracking and non-coherent accumulation to ensure image quality; otherwise, effective micro-Doppler images cannot be obtained, reducing recognition performance. Secondly, classifiers based on deep learning algorithms implicitly extract features and cannot provide effective explanations; their training results depend on sample quality, which may pose systemic risks.
4.3 Situational Awareness

Currently, due to cost constraints, most anti-drone radar solutions
cannot use multi-face array antennas and can only utilize single-face arrays to monitor specific areas.Therefore, for situations requiring 360° coverage, these anti-drone radars face an imperfect triangle problem, namely how to balance detection, tracking, and recognition.On one hand, to improve detection probability, a longer radar dwell time is needed; on the other hand, to enhance tracking efficiency, a faster revisit rate is required.These two aspects are mutually restrictive; rapid 360° situational scanning means shorter unit radar dwell times, which will reduce detection probability, and vice versa.Moreover, if multi-dimensional information such as tracking information and micro-Doppler features is used for target recognition, rapid track updates will benefit target recognition, but shorter radar dwell times will reduce frequency resolution, affecting the quality of micro-Doppler signals, thereby impacting target recognition performance, and vice versa.This unbalanced triangular relationship severely limits the system performance of anti-drone radars.'Track radar' and 'micro-Doppler radar' both introduce track information in the recognition unit in practical applications, failing to achieve balance, and may not be the optimal anti-drone radar solution, still having room for performance upgrades.The key to resolving this contradiction lies in changing the traditional radar signal processing flow, transforming the serial, unidirectional signal flow in Figure 8(a) into the parallel, bidirectional signal flow in Figure 8(b). First, the tracking unit and recognition unit need to operate separately, meaning that target recognition can focus on echo recognition within the current radar beam without using tracking information; then, the recognized attribute information can be fed back to the signal detection unit for 'Integrated Detection and Recognition (IDR)' processing to improve detection probability, or feedback to the tracking unit for 'Track after Recognition (TAR)' processing to enhance tracking efficiency; finally, through this method, the radar can operate while 'scanning, recognizing, and tracking,' real-time displaying all targets within the monitored area. This method upgrades traditional three-dimensional measurement radar (distance, speed, and position) to four-dimensional perception radar (distance, speed, position, and attributes), thereby enhancing the radar's situational awareness capability, making it a 'what you see is what you get' system.
The key to resolving this contradiction lies in changing the traditional radar signal processing flow, transforming the serial and unidirectional signal flow in Figure 8 (a) into the parallel and bidirectional signal flow in Figure 8 (b). Firstly, the tracking unit and recognition unit need to operate separately, which means that target recognition can focus on echo recognition within the current radar beam without using tracking information; Next, the identified attribute information can be fed back to the signal detection unit for "Integrated Detection and Recognition (IDR)" processing to improve detection probability, or fed back to the tracking unit for "Track after Recognition (TAR)" processing to improve tracking efficiency; Finally, through this method, the radar can operate simultaneously with "scanning, recognizing, and tracking", displaying all targets within the monitoring area in real time. This method upgrades traditional 3D measurement radar (distance, velocity, and position) to 4D perception radar (distance, velocity, position, and attributes), thereby enhancing the radar's situational awareness capability and making it a "what you see is what you get" system.
The initial focus of anti-drone radar was on the missed detection of LSS drone targets rather than false alarms. Therefore, increasing the detection range can be achieved by lowering the detection threshold, although this may increase false alarms. However, using ATR technology to process false alarms can reduce them while maintaining no missed detections, thereby enhancing the detection range. Experiments have shown that using ATR functionality to process false alarms can effectively eliminate a large number of clutter objects, allowing the radar to detect small drones with RCS between 0.01 and 0.1 m2, with a detection range extending to 12 km, and even exceeding 14 km. It can identify various objects including but not limited to ships, birds (large birds, small birds, and flocks), and drones (fixed-wing drones, multi-rotor drones, and vertical take-off and landing drones). The ATR function is effectively associated with tracking information, providing comprehensive situational awareness in the radar monitoring area. Figure 10 shows a typical application scenario of situational awareness, including birds chasing ships to prey on fish. The white dashed line describes the tracking trajectory of the object, and the numbers around the icon represent the tracking number of the object. Specifically, a bird with tracking number 6264 was observed flying around a ship with tracking number 6283, causing the bird's radar echo to interfere with the detection of the ship. Sometimes, the identification process classifies the data as either birds or ships, especially when they appear in the same radar unit. Birds often chase ships at sea to prey on fish stirred up by the propellers, and this situational awareness demonstrates the biological learning behavior of seabirds. Furthermore, the overall radar detection response time (Detection Response Time, DRT) is approximately 10 ms, indicating that the delay between the target echo return, detection, and final display is in the millisecond range. Therefore, situational awareness can achieve real-time continuous updates, enhancing the radar system's capability as a 'what you see is what you get' system or real-time perception alert system.

5. Conclusion
The importance of anti-drone radar lies in its need for more ATR functionality than traditional air defense radar. Traditional radar operators can classify large, high-speed, high-altitude targets based on information such as tracks and radar cross-section through 'man-in-the-loop' classification. However, LSS drone targets appear as flickering ghosts in the air, making it difficult to effectively detect, track, and classify them from clutter, including birds, using traditional methods. Future research directions for anti-drone radar systems encompass many aspects of advancing ATR technology, including integrating multimodal features, exploring diversified radar stations, and integrating multi-sensor capabilities. This comprehensive systems engineering approach is crucial for developing effective C-UAS solutions. The conclusions of this paper are as follows:
1. For anti-drone radar, ATR technology is essential, especially for drones belonging to Groups 1 and 2.
2. From the perspective of ATR technology, this paper analyzes two typical anti-drone radar designs. Whether it is track discrimination or micro-Doppler identification, practical applications often require the radar to be in a staring or tracking state, which may lead to longer overall C-UAS response delays, adversely affecting the overall performance of anti-drone radar.
3. By integrating ATR functionality, the detection range, identification capability, and situational awareness of drones can be significantly enhanced. This integration can upgrade traditional 3D anti-drone radar to 4D anti-drone radar (providing 3D position and 1D attributes), thereby improving drone detection performance. These advancements are expected to enhance the performance of anti-drone radar in military, civilian, and commercial fields.
*Statement: The copyright of this article belongs to the author and is for academic sharing only.It does not represent any position. If there is any infringement or objection, please contact the editor for deletion.

Address:8th Floor, Building 20, Guanggu New Power, East Lake High-Tech Development Zone, Wuhan, 430205.
Telephone:+86 13343423376 / +86-027-65520251
E-mail:lkd@radardo.com



SAF Coolest v1.3.1.2 设置面板 ADSSX-AONN-OSSVE-ZEZ
无数据提示
Sorry, the current column is being updated, please look forward to it!
You can view other columns or returnHome Page